障害物が出ても安心
4つの特殊機能を搭載した
究極の推進工法!
4 Special Function
Function01
推進掘削する前方の金属障害物を
推進しながら探査!
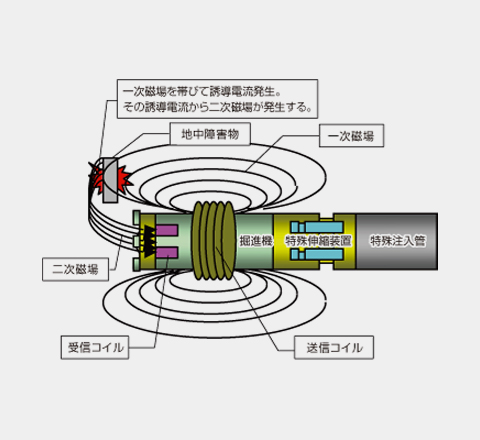
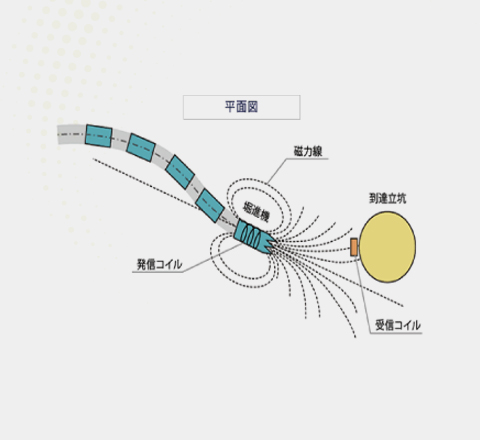
掘削推進中に障害物が存在した場合、掘進機から約2メートル先の障害物を捕らえ検知します。
掘進機に取り付けた発信コイルから電磁波が放出され地中にある金属障害物に磁気(1次磁場)を浴びせます。
その磁気を帯びた金属障害物は誘導電流を発し、磁気(2次磁場)を放出します。この磁気(2次磁場)を掘進機に取り付けた受信コイルで検出し、金属障害物の有無を判断します。
Function02
障害物の前後を
掘進機内部から地盤改良!
障害物の切削には時間を要します。従ってその掘削周囲の地盤がゆるみ、周辺の地下埋蔵物や地表面の沈下や隆起といった影響を及ぼすため、地盤改良を施します。 ミリングモールでは地上からの地盤改良が不可能な場合に備え、掘進機内から施工できるようになっています。
Function03
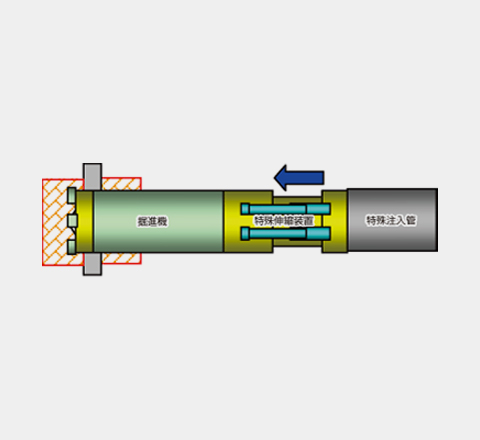
金属障害物を粉々に切削排出!
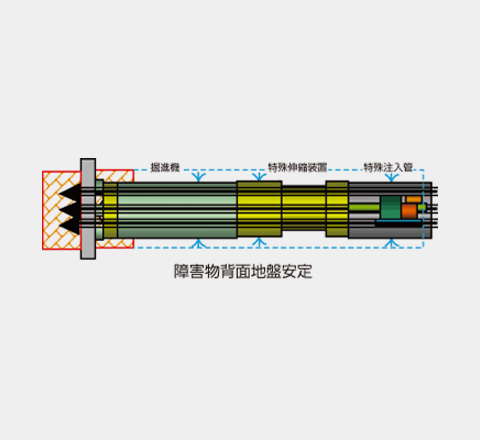
ミリングモール工法は掘進機、特殊伸縮管、特殊注入管の3つの装置から構成されます。掘進機には障害物を切削するための専用特殊ビットを装備し、障害物探査用の発信コイル、受信コイルを内蔵しています。また、カッタービットは機内交換にも対応しています。 特殊伸縮管には障害物を切削時に使用し、超低速で掘進機を障害物に押し当て切削を行います。特殊注入管には掘進機前面や障害物背面等の地盤改良を行う設備が搭載されます。
Function04
掘進機を立坑所定位置へ誘導!
到達立坑内所定位置に受信コイルを設置し、掘進機をその位置へ誘導するシステムです。到達手前約40mから計測し、リアルタイムに掘進機の方位角度を計算表示します。
フォームが表示されるまでしばらくお待ち下さい。
恐れ入りますが、しばらくお待ちいただいてもフォームが表示されない場合は、こちらまでお問い合わせください。